Ласточкин Антон
пятница, 1 января 2021 г.
Лидарное картографирование
Система лидарного картографирования предназначена для получения трёхмерной карты по данным от трехмерного лазерного сканирования (лидар) и навигационных датчиков (GPS,INS). Достижения:
- Архитектура ПО для системы автомобильного и беспилотного базирования
- Версия для склейки 3D-облаков точек по данным датчиков, с конфигурированием оборудования
- Хранение и обработка в виде тайлов
- Отработка узких мест на симуляторе
- Применение алгоритмов SLAM в ROS
Результат раскрашенного и склеенного облака точек:
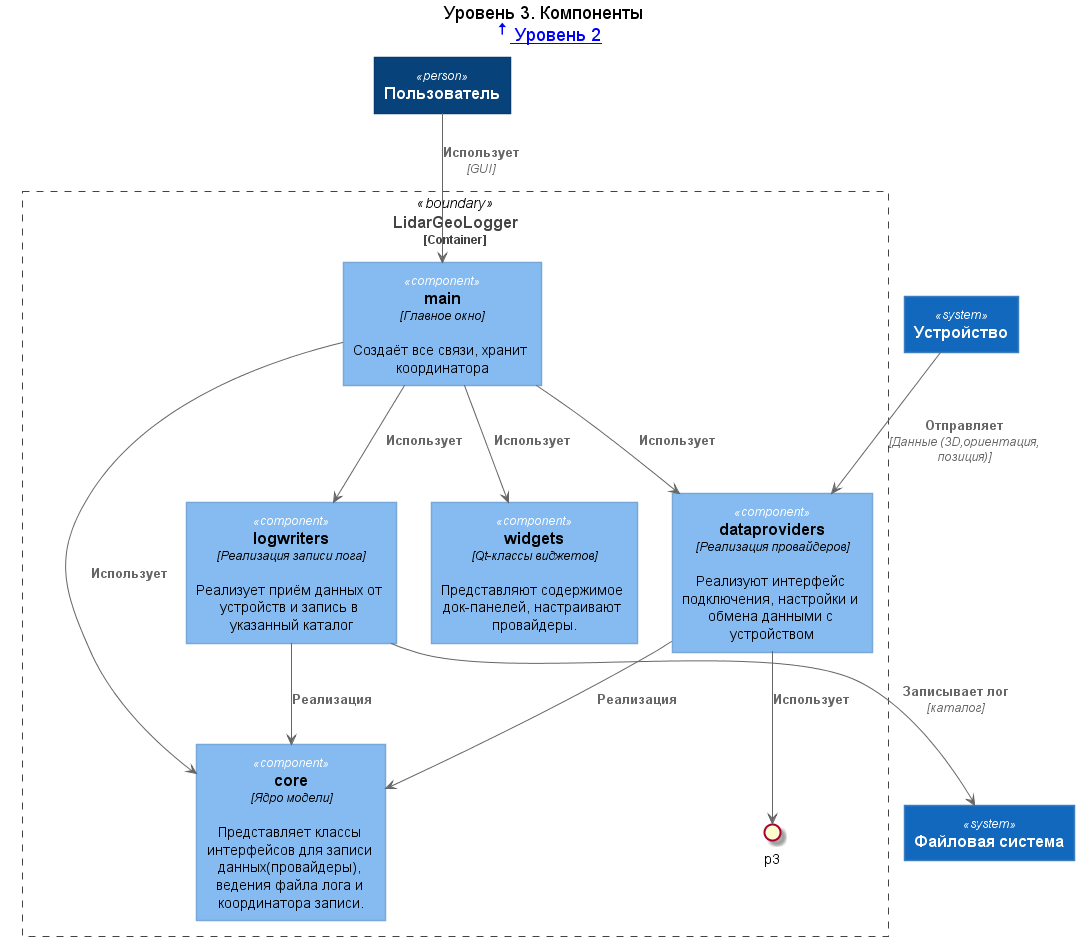
 Архитектурное решение для отделения логики провайдеров данных от логгеров и виджетов (нотация C4):
Архитектурное решение для отделения логики провайдеров данных от логгеров и виджетов (нотация C4):